可 制御 可 観測
3 可制御性 可観測性 Ppt Download
Ppt 4 可制御性 可観測性 Powerpoint Presentation Free Download Id 6042106
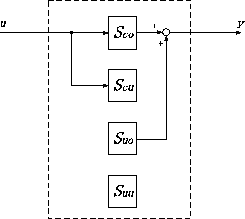
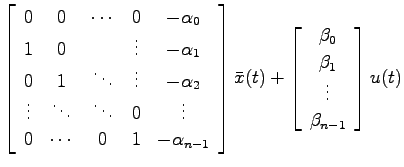
可制御正準形 可観測正準形 多入力多出力
可制御性 可観測性 Controllability Observability

可制御性 可観測性 初級mathマニアの寝言
可制御性 可観測性 Controllability Observability
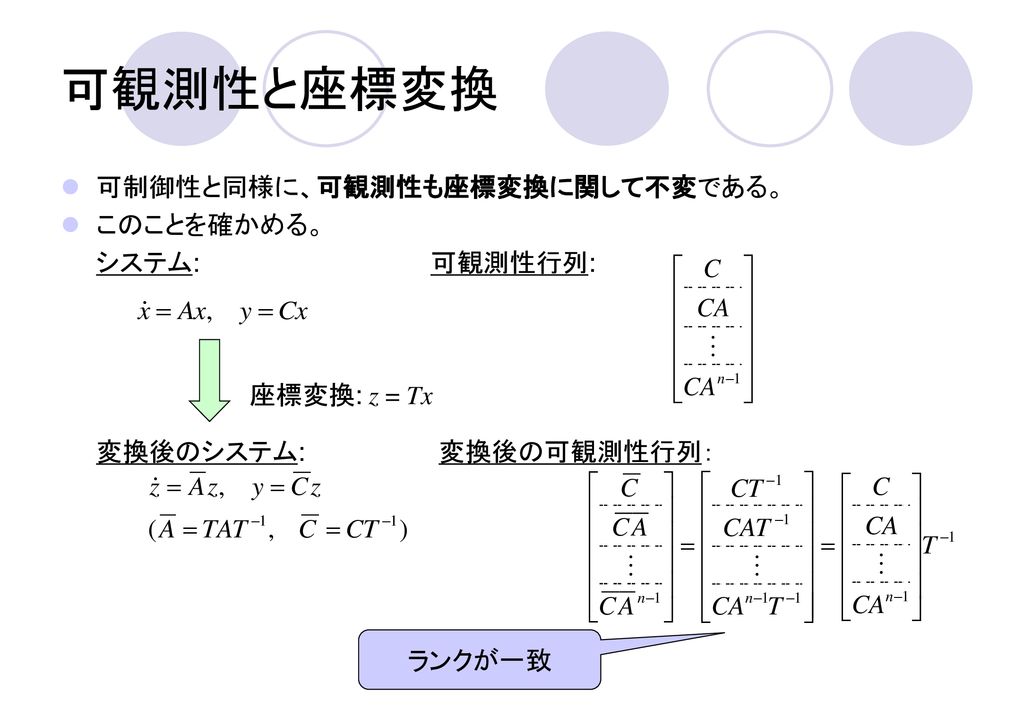
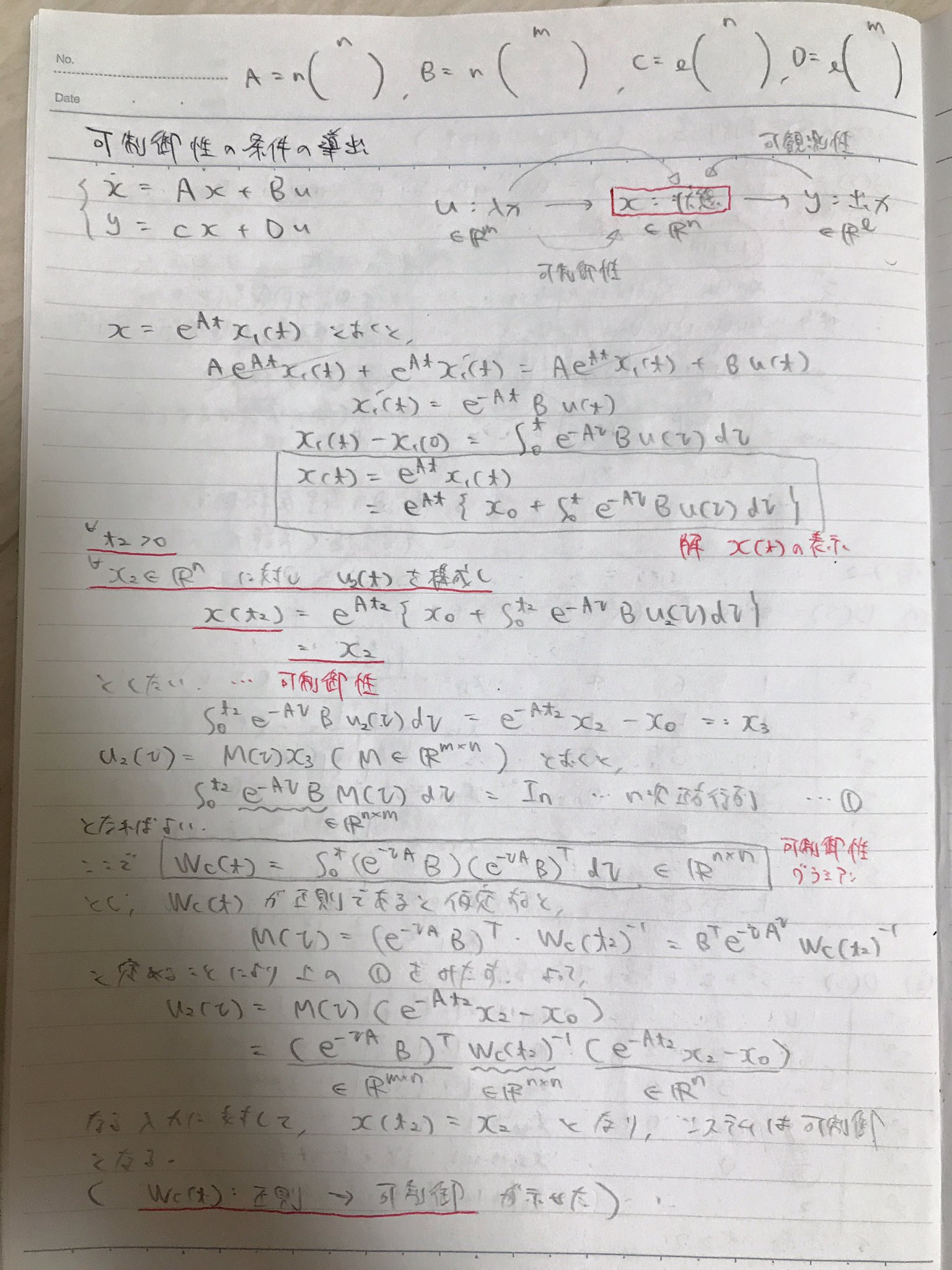
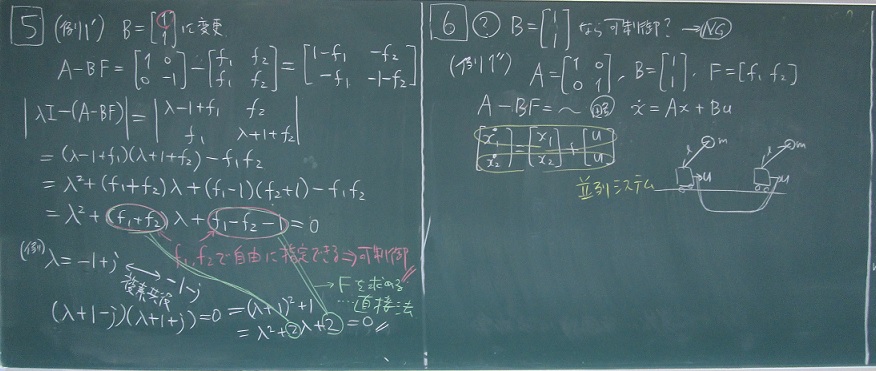
可制御性と可観測性 学習目標 可制御性の判定方法について学ぶ.
可 制御 可 観測. 可観測性 4 3 このとき 行列a 22 が漸近安定であるならば 可検出 detectable であるという これは ちょうど可安定性に対応した概念である 例題4 1 倒立振子系に対して 振子の角度íならびに台車の位置zが計測できるときの可観測性. X np. Vstack u x print u. 慣性系 図1 4の慣性系において mは物体の質量 uは外力を表す 物体と床との摩 擦を無視すれば 物体の運動方程式は mx u 1 18 となる ここで x1 x x2 x y x 1 19 とおくことによって つぎの状態方程式と出力方程式を得る.
1 2 b 1. 可観測性の判定 1出力システムの場合は可観測性行列の行列式が0にならなければ可観測と判定できます def observability check a c. 可制御性 可観測性 システム x t a x t b u t y t c x t a 2 1. Dot x a u np.
1 c 1 0 の可制御性と 可観測性を. X np. Dot c a for j in range i. 可制御性 controllability 状態方程式が与えられたとき 入力uによって系の状態を任意に制御できる 定義 任意の初期状態 x 0 と.
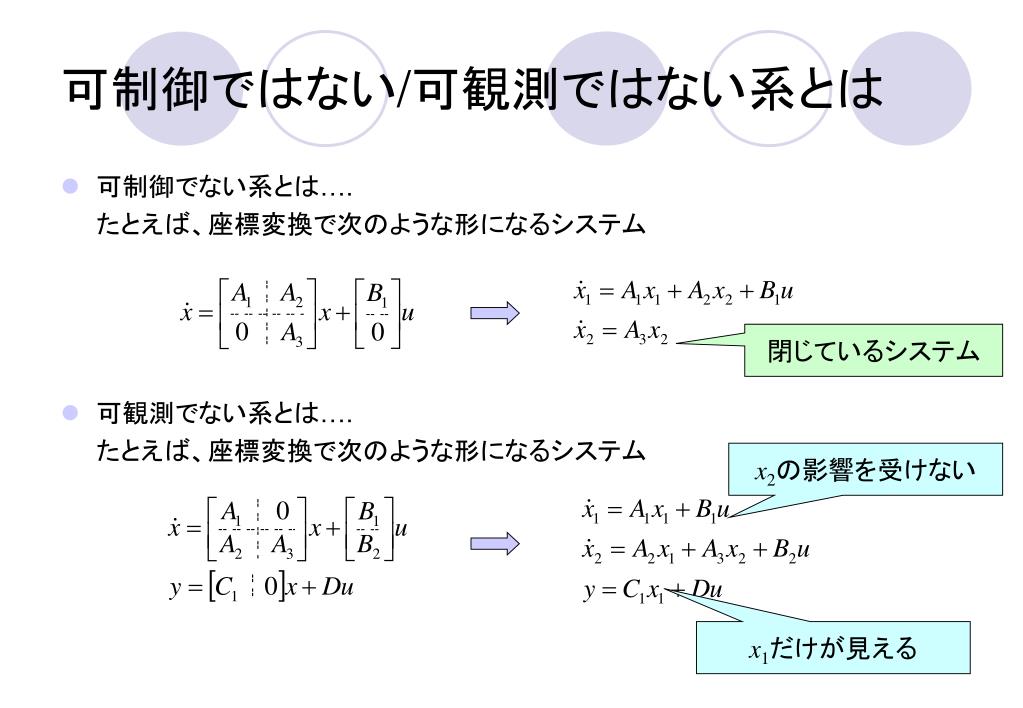
可制御性と可観測性 1960 年頃r e kalman により創始された現代制御理論の最も基礎となる概念について説明する ここに現代制御理論 のエッセンスがつまっているといってもよい 状態方程式の導出方法については人間システム制御工学1の資料を読み. 図2 8 の場合 の部分は可制御 可観測であり の部分は可制御 不可観測 の部分は不可制御 可観測 の部分は不可制御 不可観測である システム全体としては不可制御 不可観測となる b 判別法 2 118 式のシステムにおいて 次の の複合マトリックスが の階数 rank であるときは. 4 第1章 状態方程式と伝達関数 慣性系 um x 図1 4.
可制御正準形 1入力
可制御正準形 可観測正準形 多入力多出力
可制御性 可観測性 Controllability Observability
概論 第1講の要旨 システム制御工学は 社会の多くのシステムにおいて実利用 詳細説明へ システム制御の基本概念は モデリング フィードバック フィードフォワード 伝達関数 可観測性 可制御性 不変性 パラメータ感度 最適化 詳細説明へ
可観測正準形 1出力
電気うさぎ On Twitter 現代制御 可制御性と可観測性の同値条件の自然な導出を試みた ほとんど線形代数の話

可制御可観測な線形システム全体の集合は多様体になる 初級mathマニアの寝言
概論 第1講の要旨 システム制御工学は 社会の多くのシステムにおいて実利用 詳細説明へ システム制御の基本概念は モデリング フィードバック フィードフォワード 伝達関数 可観測性 可制御性 不変性 パラメータ感度 最適化 詳細説明へ

可制御性 可観測性 初級mathマニアの寝言

制御工学入門 制御対象の可制御性と可観測性 理工系学生向け Youtube

可制御性行列 の証明 機械系大学院生の生活
授業 動的システムの解析と制御2015 Kobayashi Laboratory Homepage
状態制御論